Хирурги роботы: 5 роботов, которые изменили наши представления о хирургии
Робот-хирург Да Винчи (da Vinci)
Роботизированная хирургия — это хирургия нового поколения, цель которой совместить самые сильные стороны технологии и человеческого разума. Робот, движениями которого управляет человек, — не это ли мечта всех фантастов прошлого?
Многих пациентов предложение врача о проведении операции с помощью робота-хирурга застает врасплох и вызывает недоумение. Да, хирургическая система действительно является роботом, но управляет роботом и делает операцию все еще хирург.
Робот-хирург впервые был применен в США в 2000 году, после чего данная технология начала набирать популярность практически во всем мире — страны Европы, Южная Корея, Япония, Сингапур и, наконец, Россия. Сейчас в мире работают более 3000 роботизированных систем выполнения операции. В России на 2016 год используется 25 роботов. На одном из них регулярно проводятся операции в нашей Клинике.
Роботизированная хирургия широко и успешно применяется во многих областях медицины: колопроктология, урология, гинекология, отоларингология, кардиоторакальная хирургия и других. За 2016 год в мире было выполнено более 3 миллионов роботических операции, с каждым годом этот показатель увеличивается в геометрической прогрессии. Поэтому робота-хирурга сложно назвать новой и малоизученной технологией. Но можно с уверенностью сказать — что это инновационная технология, которая находится только в самом начале своего развития. Вместе с ней, хирургию ждет очень много открытий и положительных изменений.
Роботическая хирургия. Что это такое?
Робот — это хирургическое устройство с роботизированным приложением, которое находится под постоянным контролем хирурга. Эта система дает возможность хирургам получить трехмерное изображение тела изнутри, хирургические инструменты робота небольшого размера, могут изгибаться и вращаться в гораздо большем диапазоне, чем человеческая рука.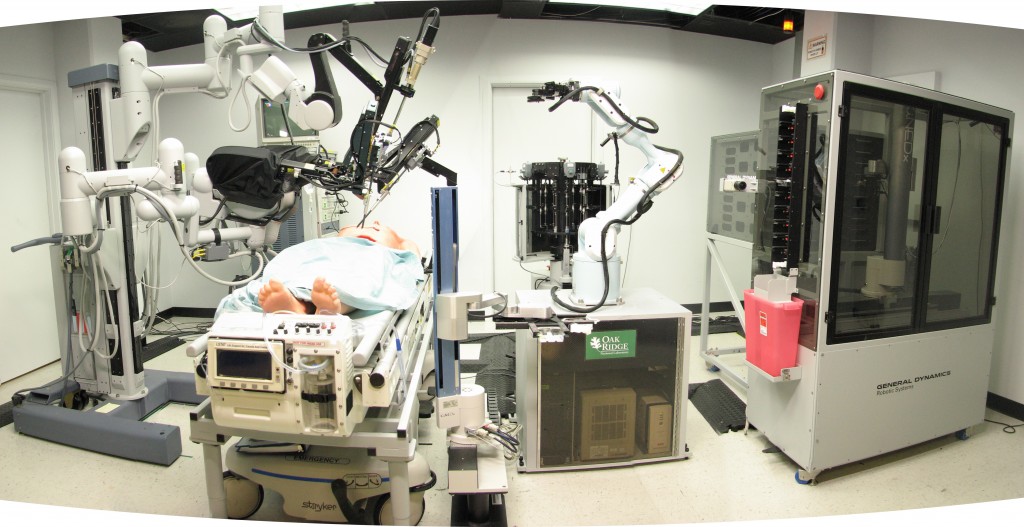
Роботическая система состоит из двух блоков: консоль для оператора-хирурга и непосредственно четырехрукий робот-манипулятор, который имеет в своем составе 4 “руки” — 4 рабочих инструмента, один из которых камера, остальные — тот или иной хирургией инструмент, который необходим врачу. Хирург располагается у своей консоли, которая обеспечивает ему 3D многократноувеличенное изображение внутренних органов и двигает специальные джойстики, движения которых передаются на инструменты робота через систему рычагов. Робот выполняет все то, что сделал хирург, но с меньшей амплитудой, что и позволяет добиться именно той точности движений, которая так цениться у робота. Положение хирурга принципиально отличается от известной многим лапароскопической хирургии, когда врач стоит у операционного стола и непосредственно сам держит те инструменты, которыми выполняется операции, и смотрит в экран расположенный перед ним.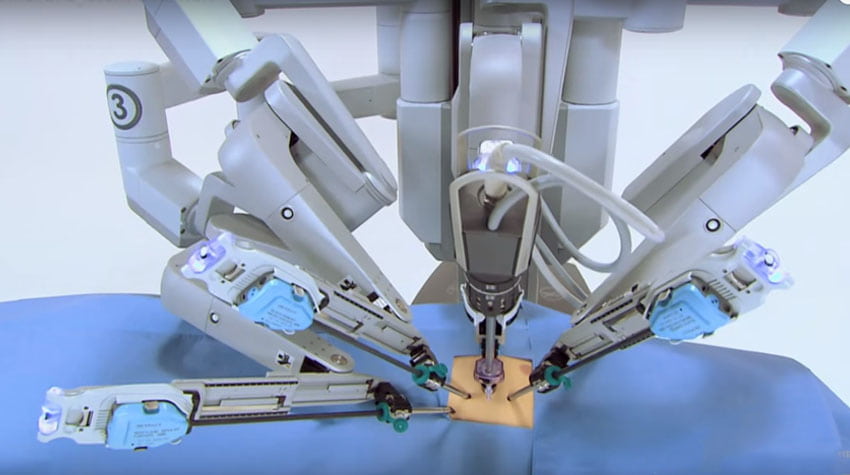
Преимущества роботических операций для хирурга:
- Большая хирургическая точность
- Увеличенный диапазон движения
- Лучшая визуализация, включая области, которые трудны для осмотра невооруженным глазом
- Лучший доступ к труднодоступным областям
- Контроль усталости тремора рук
Как проходит роботическая операция?
Вначале хирург делает несколько крошечных разрезов для введения миниатюрных инструментов и камеры высокого разрешения внутрь тела пациента. Камера позволяет хирургу получать увеличенное трехмерное изображение операционного поля высокого разрешения.
Затем хирург, удобно расположившись на эргономичной консоли, с 3D изображением и рычагами управления инструментами в руках использует их для выполнения манипуляций под контролем зрения. Система переводит в реальном времени движение руки хирурга в точные движения инструментов внутри пациента.
Система переводит в реальном времени движение руки хирурга в точные движения инструментов внутри пациента.
На протяжении всей операции хирург контролирует каждую хирургическую манипуляцию. Система не может быть запрограммирована или действовать каким-либо образом без хирурга.
Преимущества роботических операций для пациента:
- Меньшее количество осложнений
- Менее выраженный болевой синдром после операции
- Меньшая потеря крови
- Быстрое восстановление после операции
- Менее заметные послеоперационные рубцы
- Быстрое восстановление после операции
Роботизированная хирургия. Опыт клиники ККМХ
В нашей клинике операции роботом-хирургом da Vinci на регулярной основе начали проводить с 2014 году. К внедрению новой технологии мы подошли крайне серьезно и ответственно: обучать сотрудников роботической хирургии был приглашен один из пионеров этого направления — профессор Нам-Куй Ким (Nam-Kyu Kim) из Южной Кореи со своей командой. Обучение и подготовку прошел весь хирургический персонал отделения, ведь это только на первый взгляд кажется, что успешный исход операции лежит на плечах хирургах, управляющего роботом. На самом деле в проведении операции задействована вся команда и от профессионализма каждого зависит результат операции и качество жизни пациента. В 2015 году заведующая отделением И.А. Тулина прошла полугодовую стажировку в Южнокорейской клинике, где на ежедневной основе проводила роботизированные операции под руководством профессора Кима.
Обучение и подготовку прошел весь хирургический персонал отделения, ведь это только на первый взгляд кажется, что успешный исход операции лежит на плечах хирургах, управляющего роботом. На самом деле в проведении операции задействована вся команда и от профессионализма каждого зависит результат операции и качество жизни пациента. В 2015 году заведующая отделением И.А. Тулина прошла полугодовую стажировку в Южнокорейской клинике, где на ежедневной основе проводила роботизированные операции под руководством профессора Кима.
На сегодняшний день мы являемся одной из немногих клиник в России, где операции с применением робота da Vinci поставлены «на поток». Для нас роботические операции уже не являются новой технологией, мы смогли полностью освоить и внедрить данный вид хирургического лечения в нашу регулярную практику. За последний год в нашей клинике было проведено более 100 успешных операций с помощью робота-хирурга, что значительно превышает показатели других клиник.
Помимо обучения хирургов из других российских клиник наши врачи продолжают повышать мастерство владения и осваивать вновь появляющиеся функции робота da Vinci.
Роботическая хирургия. Лечение в клинике ККМХ
Каждая операция в клинике считается уникальной. Каждый раз с новым пациентом разрабатывается индивидуальный ход операции. Мы всегда ставим для себя три основные цели перед началом любой операции:
- полностью удалить опухоль, чтобы избежать дальнейшего рецидива;
- не затронуть нервные окончания, мочеполовую систему, чтобы сохранить качество жизни пациента;
- провести операцию с минимальной кровопотерей, чтобы обеспечить быстрое восстановление и возвращение пациента к нормальной жизни.
Роботическая хирургия помогает нам этого добиться.
Для граждан РФ существует возможность проведения роботической операции на бесплатной основе по квотам ВМП или по федеральной квоте. Остальные категории пациентов могут получить помощь на платной основе.
Для того чтобы определить, подходит вам роботическая хирургия или нет, и возможно ли получить квоты на бесплатное лечение, необходимо пройти консультацию с врачом Клиники.
Здоровье: Наука и техника: Lenta.ru
Роботы-хирурги все чаще проводят успешные операции на живых организмах. Так, в начале 2022 года система Smart Tissue Autonomous Robot (STAR) прооперировала свинью — сделала надрезы, провела манипуляции с кишечником и аккуратно нанесла швы. Создатели робота STAR уверены, что именно таким и окажется будущее хирургии. «Лента.ру» расскажет, как у машины получилось автономно провести операцию, какие преимущества есть у роботов-медиков и чего можно ждать в этом направлении.
Без человеческого участия
Система STAR, разработанная специалистами Университета Джонса Хопкинса (США), является уникальной в том плане, что для ее функционирования участие живого специалиста не требуется. Машина самостоятельно оценивает участок организма, с которым ей предстоит работать, делает надрезы, совершает операции и зашивает рану. Различные механизмы устройства заменяют органы настоящего хирурга: глаза — высокоточные камеры, руки — сложные манипуляторы, мозг — компьютер, подключенный к медицинским базам данных.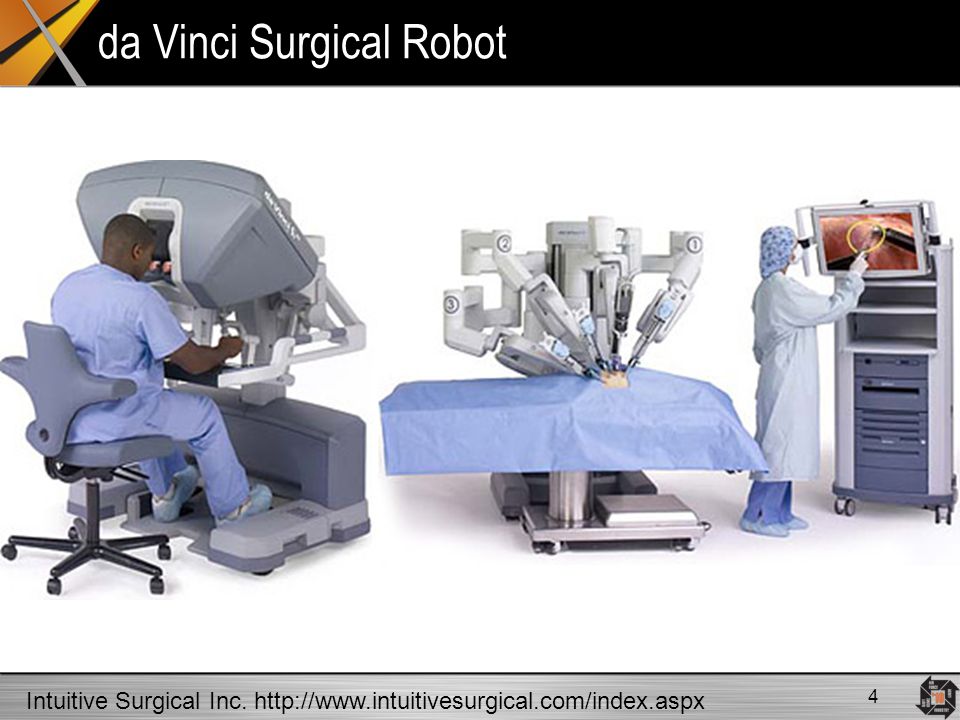
Манипуляторы робота STAR
Фото: ASME / YouTube
В настоящий момент машина специализируется на небольших операциях, которые так или иначе требуют высокой точности. Робот STAR качественно провел операцию по манипуляциям с внутренними органами: например, анастомоз, который подразумевает под собой восстановление целостности кишечника. На начальном этапе развития устройство успешно справлялось со своей задачей, однако тратило на операцию в несколько раз больше времени, чем обычный хирург. Не так давно ученым Университета Джонса Хопкинса удалось добиться успеха — их робот смог провести анастомоз быстрее живого специалиста. В рамках эксперимента STAR прооперировал свинью, соединил фрагменты кишки и наложил швы.
Следящие за процессом врачи заметили, что робот не совершает ошибок, связанных с человеческим фактором, — например, усталостью. Так, процедура наложения швов оказалась более точной и последовательной, чем у обычного хирурга. Искусственное зрение машины также превосходит зрение человека: оборудование отличается наличием камер высокого разрешения, которые могут работать при любых условиях освещения и в инфракрасном диапазоне.
Призвание подобных роботов — малоинвазивные операции, которые не требуют от устройства высочайшей квалификации, но в большей степени нуждаются в аккуратном обращении с пациентом
Например, STAR и другие подобные роботизированные системы могли бы вырезать небольшие опухоли или проводить иные процедуры на мягких тканях. Похожие машины могут потребоваться во время перемещения тяжелобольного пациента или в отдаленных регионах — по понятным причинам в машине или самолете скорой помощи и в больницах небольших городов может не оказаться профессионального хирурга.
С гениальностью Да Винчи
В настоящий момент индустрия роботизированной хирургии, как правило, охватывает методы инвазивного лечения с применением высокотехнологичных средств, но под жестким контролем человека. Различные медицинские устройства напичканы точными камерами и сенсорами и выглядят, как инопланетные корабли, однако они выполняют лишь роль ассистента.
«Робот никогда не принимает решений и не делает надрезы», — говорят ученые Калифорнийского университета в Лос-Анджелесе.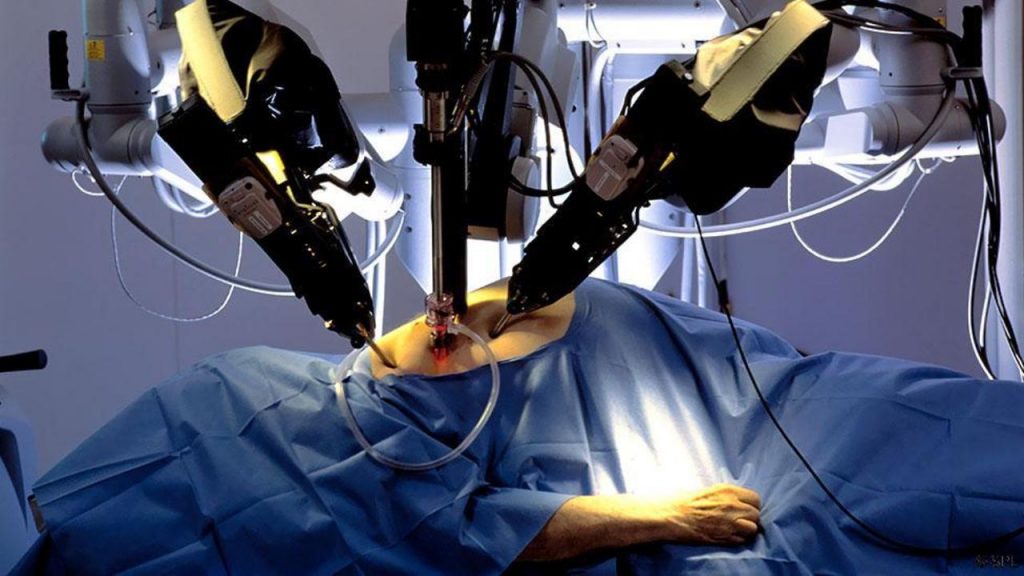 Основное предназначение медицинских роботов — подстраховать человека и сделать его движения более точными и плавными.
Основное предназначение медицинских роботов — подстраховать человека и сделать его движения более точными и плавными.
Материалы по теме:
Долгая счастливая жизнь.Как технологии будущего помогут победить болезни и спасут миллиарды жизней?
9 ноября 2021
В ногу со временем.Как технологии вернут возможность незрячим видеть, а инвалидам — свободно передвигаться
12 ноября 2021
«Создают то, чего не было раньше»Как ученые влияют на жизни миллионов людей
22 ноября 2021
Операция с использованием типичной роботизированной системы начинается с нанесения небольших надрезов человеческой рукой в необходимом месте. Затем специалист помещает в них крошечные инструменты, связанные с роботом, и камеру высокого разрешения. После этого хирург может снять перчатки и сесть за компьютер.
«Когда вы играете в видеоигру, вы нажимаете кнопку управления, и машина переводит ваши движения в режим реального времени, точно имитируя ваши действия на экране», — упрощенно описывают суть операций с применением роботов медики. Уникальность технологии в том, что манипуляторы медицинской машины имеют гораздо более широкий диапазон движений, чем человеческие руки. Также робот не устает, его конечности не дрожат от усталости и не способны занести под кожу инфекцию.
Уникальность технологии в том, что манипуляторы медицинской машины имеют гораздо более широкий диапазон движений, чем человеческие руки. Также робот не устает, его конечности не дрожат от усталости и не способны занести под кожу инфекцию.
Роботизированная хирургическая система daVinci — одно из первых устройств, которое позволяет упростить работу живого специалиста и значительно расширить его возможности. Система представляет собой передовую роботизированную платформу, которая состоит из терминала для управления машиной, тележки с четырьмя интерактивными роботизированными руками, камеры и специальных инструментов. Еще в 2000 году Управление по санитарному надзору за качеством пищевых продуктов и медикаментов США (FDA) одобрило использование daVinci, с тех пор было установлено почти две тысячи системы фирмы, профессиональные хирурги провели с помощью роботов более 700 тысяч операций.
Манипуляторы робота da Vinci
Кадр: Da Vinci Surgery / YouTube
Распространению подобных daVinci систем и полной замене ими традиционных способов хирургического вмешательства, когда всю работу приходится выполнять живому специалисту, мешает высокая стоимость роботизированного оборудования, ввозимого из-за границы.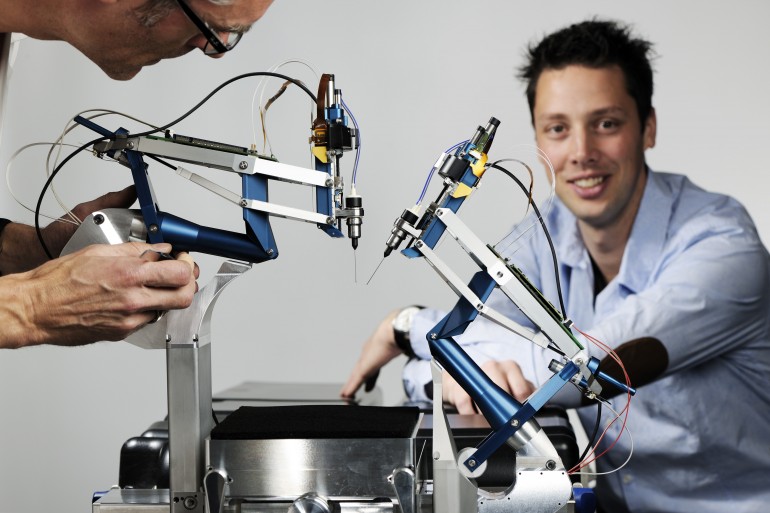 Поэтому в различных регионах мира создаются аналоги популярной системы.
Поэтому в различных регионах мира создаются аналоги популярной системы.
Например, специалисты Тяньцзиньского университета используют робота Micro Hand S, который отличается небольшими габаритами и уникальной особенностью функционирования. В основе лежит модель оригами, благодаря которой манипуляторы устройства умеют складываться практически под любым углом, позволяя хирургу совершить надрез любой сложности. Будучи меньше и легче, робот экономит место, а также сокращается время, необходимое для его установки.
Еще одна особенность Micro Hand S заключается в интеграции робототехники и бионики. Создатели робота подсмотрели строение тропического растения Nepenthes alata, побеги которого имеют вид кувшинок для накопления жидкости. На основе этого инженеры добавили функцию автоматической стерилизации медицинских инструментов. Также специалисты изучали строение подушечек лап древесных лягушек, которые могут очень крепко, но мягко цепляться за поверхности. Эта технология позволила создать инструмент, который не дает нанести живой ткани излишний вред — сидящий за терминалом хирург контролирует силу нажатия на скальпель посредством тактильной обратной связи.
Почему робот лучше
Многие люди привыкли относиться к роботам снисходительно или с недоверием. Скептики уверены, что дорогая неповоротливая машина не может заменить живого врача. К тому же в случае неудачного хирургического вмешательства, проведенного роботом, умному устройству невозможно предъявить обвинения. Однако многие пациенты уже оценили пользу новейших технологий.
Например, по данным создателей роботизированной хирургической системы daVinci, при лечении рака простаты мужчины чаще выбирают лечение с помощью машины, также большее количество женщин склоняются к помощи робота при проведении минимально инвазивной гистерэктомии.
С помощью медицинских машин врачи лечат заболевания, связанные с общей хирургией, колоректальной, гинекологической, торакальной, урологической хирургией, проводят операции на сердце
Если ориентироваться на реально существующих в медицинских центрах роботов, а не на полностью автономные машины из будущего, то основное преимущество медтехники заключается в расширении инструментала хирурга. Живой профессионал во время операции находится не на ногах, а сидит в кресле, движениями рук управляя манипуляторами и скальпелем. Вероятность врачебной ошибки из-за усталости снижается, медик может более ловко выполнять движения со сложной амплитудой.
Живой профессионал во время операции находится не на ногах, а сидит в кресле, движениями рук управляя манипуляторами и скальпелем. Вероятность врачебной ошибки из-за усталости снижается, медик может более ловко выполнять движения со сложной амплитудой.
Специальные камеры высокого разрешения дают врачу возможность максимально подробно рассмотреть орган, который он оперирует, нанести точные разрезы и наложить аккуратные швы. Цифровые органы зрения находятся в очень маленьких камерах, которые можно разместить в теле пациента и фактически рассмотреть его изнутри.
Также близится к нулю вероятность заражения организма пациента, ведь с последним работают непосредственно не руки человека, а стерильные манипуляторы. В комфортных для врача условиях операции должны выполняться быстрее и более качественно, что позитивно влияет на сроки выздоровления и нахождения пациента в клинике.
Операционная палата с роботом-медиком
Фото: Cleveland Clinic Abu Dhabi / YouTube
Не стоит забывать, что при подобном виде медицинского вмешательства непосредственное присутствие врача рядом с пациентом не требуется. Поэтому привлечение в медицину даже роботов-ассистентов даст толчок развитию телехирургии — удаленному проведению операций. Это позволит одному специалисту заниматься лечением больных, находящихся по всему миру. Эксперты лишь отмечают тот факт, что для связи между терминалом специалиста и медицинским роботом необходима быстрая связь с минимальной задержкой — это может обеспечить стандарт 5G. Распространение методов лечения с помощью роботов в хирургии поможет решить вопрос с дефицитом кадров.
Поэтому привлечение в медицину даже роботов-ассистентов даст толчок развитию телехирургии — удаленному проведению операций. Это позволит одному специалисту заниматься лечением больных, находящихся по всему миру. Эксперты лишь отмечают тот факт, что для связи между терминалом специалиста и медицинским роботом необходима быстрая связь с минимальной задержкой — это может обеспечить стандарт 5G. Распространение методов лечения с помощью роботов в хирургии поможет решить вопрос с дефицитом кадров.
Будущее хирургии
Роботизированная хирургия существует уже более трех десятилетий, многие ученые полагают, что в будущем малоинвазивные операции будут проводиться исключительно роботами. Если технологии докажут свою состоятельность в масштабе целого мира, то возможно использование роботов в сложных операциях и постепенная замена живого специалиста.
Я действительно верю, что это будущее хирургии
Аксель Кригердоцент кафедры машиностроения в Университете Мэриленда, один из создателей STAR
Эксперты склоняются к мнению, что в ближайшие годы роботы смогут более творчески заниматься операциями на живых организмах, адаптируясь к изменениям с помощью искусственного интеллекта. Подключенная к огромной базе данных медицинских заболеваний машина сможет оперативно найти информацию о конкретной болезни, сравнить случаи болезней, выявить новые закономерности, найти более безопасный и оптимальный способ решения проблемы.
Подключенная к огромной базе данных медицинских заболеваний машина сможет оперативно найти информацию о конкретной болезни, сравнить случаи болезней, выявить новые закономерности, найти более безопасный и оптимальный способ решения проблемы.
«На это следует смотреть через призму радикальных инноваций, потому что здравоохранение — это люди и спасение человеческих жизней», — отметил директор по кибербезопасности компании Micro Focus Рамсес Гальего.
В ближайшее время сегмент роботизированной хирургии разделится на два больших типа — к первому будут относиться роботы-ассистенты, ко второму — полностью автономные машины, способные самостоятельно провести операцию. Разумеется, для управления роботами врачам придется повышать свою квалификацию, но в будущем медиков будут сразу учить взаимодействовать с точным оборудованием. В случае автономных устройств задействовать хирурга не нужно — человек будет лишь следить, как роботизированная система проводит манипуляции с органами человека или удаляет опухоль.
Роботическая хирургия | Боткинская больница
Skip to contentSkip to navigationЗа последнее десятилетие в развитии медицины произошли глобальные изменения. На помощь хирургам пришли роботы, с помощью которых удалось повысить качество проводимых операций и получить максимально быстрое возращение пациента к привычной жизни у пациентов.
Операции на комплексе Da Vinci Si проводятся как по ОМС, так и на платной основе
Опыт проведения более 2 000 операций
Преимущества роботизированной хирургии на аппарате Da Vinci Si
Для хирурга
- Объемная визуализация через консоль, которая передает изображение происходящего на операционном поле, что создает эффект присутствия
- Исключается тремор рук во время выполнения операции
- С помощью «рук» робота возможны вращения на 560 градусов, что в сотни раз превышает возможности человеческого запястья и значительно улучшает точность проводимых манипуляций
- Максимально комфортное положение хирурга: сидя за консолью, врач меньше устает, что наиболее важно при длительных операциях
Для пациента
- Минимальное травмирование тканей и практически полное отсутствие боли в послеоперационный период
- Отсутствие больших разрезов и постоперационных шрамов
- Короткий период реабилитации, который позволяет быстро вернуться к привычной жизни
- Сокращение риска инфицирования и других осложнений
Роботом Da Vinci оснащены лишь четыре городские больницы, среди них – Боткинская
Во время вмешательства рядом с операционным столом находятся ассистент хирурга и операционная медсестра
У робота три «руки»: две из них держат инструменты и «проводят» операцию, на третьей установлена камера
Операционное поле выводится на мониторы (в том числе 3D), это очень удобно для наблюдения и работы хирургической бригады
После роботических операций пациенты встают с кровати уже через несколько часов после выхода из наркоза
Операции на роботе проводятся по урологии, гинекологии, абдоминальной хирургии, кардиохирургии и онкологии
Хирурги часто проводят операции на роботе с выключенным внешним светом, это удобно и не мешает манипуляциям
Главный хирург сидит во время операции за консолью и управляет «руками» робота
Роботические операции доступны москвичам по ОМС (квоты) и платно
В симуляционном центре Боткинской больницы есть симулятор робота Da Vinci, на нём повышают практические навыки в роботических технологиях московские хирурги
В Боткинской больнице более 15 хирургов владеют роботическими технологиями
Роботическая операция
Во время операции хирург находится не возле операционного стола, а сидит отдельно, за специальной установкой. Перед его глазами – монитор, а вместо инструментов — специальные джойстики, которыми он управляет.
Перед его глазами – монитор, а вместо инструментов — специальные джойстики, которыми он управляет.
Это так называемая «роботическая» операция с минимальным травматическим вмешательством. Вместо больших полостных разрезов с помощью специальных портов делают необходимое количество надрезов (размер 1-1,5 см). Роботические «руки» хирурга, которыми он управляет, позволяют выполнять самые сложные манипуляции, так как они способны поворачиваться на 560 градусов.
Робот Da Vinci Si состоит из трех элементов: рабочего места хирурга, видеостойки и операционного стола, на котором находится пациент.
Рабочее место хирурга
(консоль)
Комфортное рабочее место хирурга, где он видит хирургическую зону в трехмерном измерении через 3D-видоискатель и управляет инструментами с помощью «рук» робота. Эти инструменты обладают большим объемом и точностью движений, что позволяет выполнять выверенные манипуляции, недоступные для человеческой руки. Пациент в это время находится на некотором удалении от консоли
Операционный стол
Современный операционный стол, который при необходимости настраивается под нужным углом, в зависимости от вида выполняемой операции
Видеостойка
(расположена отдельно)
Монитор с сенсорным экраном, который позволяет всей хирургической бригаде видеть то, что происходит во время операции
Доступность
Бесплатно
по полису ОМС, в рамках оказания высокотехнологичной медицинской помощи – ВМП
ЗАПИСАТЬСЯ НА ПРИЕМ
Ответ на Ваш запрос будет сформирован и направлен на Вашу электронную почту в течение 3-х рабочих дней
Платно
ЗАПИСАТЬСЯ НА ПРИЕМ
Ответ на Ваш запрос будет сформирован и направлен на Вашу электронную почту в течение дня
Где используется роботическая хирургия?
Урология
Гинекология
Онкология
Абдоминальная хирургия
Колопроктология
Врачи, оперирующие на роботе
Шабунин Алексей
Васильевич
Главный врач
Доктор медицинских наук, профессор, член-корреспондент РАН, Заслуженный врач Российской Федерации, Заслуженный врач города Москвы, Главный хирург Департамента здравоохранения Москвы, член правления Московского общества хирургов, Заведующий кафедрой хирургии Российской медицинской академии непрерывного профессионального образования
Бедин Владимир
Владимирович
Заместитель главного врача по хирургии
Доктор медицинских наук, доцент кафедры хирургии РМАНПО, Заслуженный врач РФ, врач-хирург высшей квалификационной категории
Греков Дмитрий
Николаевич
Заместитель главного врача по медицинской части (по онкологии)
Кандидат медицинских наук, врач-хирург высшей квалификационной категории, доцент кафедры хирургии РМАНПО
Лебедев Сергей Сергеевич
Заведующий центром амбулаторной онкологической помощи,
кандидат медицинских наук,
доцент кафедры хирургии РМАНПО,
врач-онколог, врач-хирург
Тавобилов Михаил Михайлович
Заведующий онкохирургическим отделением №73,
заведующий отделением гепатопанкреатобилиарной хирургии №50,
доцент кафедры госпитальной хирургии РМАНПО,
доктор медицинских наук,
врач-хирург
Велиев Евгений Ибадович
Заведующий онкоурологическим отделением №67,
Заслуженный врач РФ,
доктор медицинских наук,
профессор кафедры урологии и хирургической андрологии РМАНПО,
врач уролог
Якомаскин Виктор Николаевич
Заведующий онкохирургическим отделением №72,
кандидат медицинских наук,
врач хирург-онколог
Кузнецов Роман Эдуардович
Заведующий гинекологическим отделением №22,
доктор медицинских наук,
Заслуженный врач РФ,
врач акушер-гинеколог
Игнатченко Ольга Юрьевна
Врач акушер-гинеколог,
хирург-онкогинеколог,
кандидат медицинских наук
Алимов Владимир Александрович
Заведующий отделением онкогинекологии №70,
врач хирург,
врач гинеколог,
врач онколог
Богданов Андрей Борисович
Врач уролог,
кандидат медицинских наук,
доцент кафедры урологии и хирургической андрологии РМАНПО
Метелев Алексей Юрьевич
Врач-уролог,
хирург-онколог онкоурологического отделения №67,
кандидат медицинских наук,
врач высшей квалификационной категории
Томилов Андрей Александрович
Врач-уролог,
хирург-онколог онкоурологического отделения №67,
кандидат медицинских наук,
врач первой квалификационной категории
Соколов Егор Андреевич
Врач-уролог,
хирург-онколог онкоурологического отделения №67,
кандидат медицинских наук,
ассистент кафедры урологии и хирургической андрологии РМАНПО
Ваш запрос будет обработан в течение рабочего дня
Генитальный пролапс (опущение и выпадение матки и стенок влагалища)
- Роботическая коррекция пролапса тазовых органов: промонтофиксация сетчатым имплантом (роботассистированная сакровагинопексия)
Миома матки и аденомиоз
- Роботическая гистерэктомия различной степени сложности
- Органосохраняющие операции – миомэктомии
Распространенный инфильтративный наружный генитальный эндометриоз
- Роботические реконструктивно-пластические операции при распространенном инфильтративном эндометриозе
- Энуклеации эндометриоидных кист яичников различной степени сложности и распространения процесса
Рак тела матки (рак эндометрия)
- Роботическая расширенная гистерэктомия с тазовой и поясничной лимфаденэктомией
Рак шейки матки.
- Роботические расширенные гистерэктомии с тазовой и поясничной лимфаденэктомией, операция Вертгейма
Опухоли яичников.
- Органосохраняющие реконструктивные операции на придатках матки при доброкачественных процессах
Рак легкого:
- Роботическая лобэктомия и билобэктомия с лимфаденэктомией
- Роботическая пневмонэктомия с лимфаденэктомией
Метастатическое поражение легких:
- Роботическая атипичная резекция легкого
Рак пищевода:
- Торакальный этап с использованием робота при выполнении экстирпации пищевода
Рак (или ГИСО) желудка:
- Роботическая гастрэктомия
- Роботическая парциальная резекция желудка
Лимфома селезенки:
- Роботическая спленэктомия
Забрюшинные образования:
- Удаление образований забрюшинного пространства с использований робота
Роботическая хирургия поджелудочной железы
- Роботическая дистальная резекция поджелудочной железы
- Роботическая дистальная резекция поджелудочной железы с сохранением селезенки и селезеночных сосудов
- Роботическая энуклеация опухолей поджелудочной железы
Роботическая хирургия печени
- Роботическая атипичная резекция печени
- Роботическая сегментэктомия
- Роботическая анатомическая резекция печени
- Роботическая фенестрация кист печени
Роботическая хирургия желчных протоков
- Роботической формирование гепатикоеюанастомоза
- Роботическая холецистэктомия
Рак правой половины толстой кишки
- Роботическая правосторонняя гемиколэктомия
Рак левой половины толстой кишки
- Роботическая левосторонняя гемиколэктомия
Рак сигмовидной кишки
- Роботическая резекция сигмовидной кишки
Рак прямой кишки
- Роботическая передняя резекция прямой кишки
- Роботическая брюшно-анальная резекция прямой кишки
- Роботическая брюшно-промежностная экстирпация прямой кишки
Рак предстательной железы
- Роботическая радикальная простатэктомия
Рак почки
- Роботическая резекция почки
- Роботическая нефрэктомия
Рак лоханки почки
- Роботическая радикальная нефруретерэктомия
Рак мочевого пузыря
- Роботическая радикальная цистэктомия
Доброкачественная гиперплазия предстательной железы
- Роботическая аденомэктомия
Стриктура лоханочно-мочеточникового сегмента
- Роботическая пластика лоханочно-мочеточникового сегмента
Что такое роботизированная хирургия? — Роботизированная хирургия
Что такое роботизированная хирургия?
Если врач скажет вам, что вам нужна операция, вы можете растеряться и забеспокоиться. Вы, вероятно, беспокоитесь о том, будет ли операция успешной, какая у вас может быть боль и сколько времени вы пропустите на работе. Хорошей новостью является то, что благодаря достижениям в области хирургических технологий вы можете ожидать совсем другого хирургического опыта в Калифорнийском университете в Лос-Анджелесе.
Вы, вероятно, беспокоитесь о том, будет ли операция успешной, какая у вас может быть боль и сколько времени вы пропустите на работе. Хорошей новостью является то, что благодаря достижениям в области хирургических технологий вы можете ожидать совсем другого хирургического опыта в Калифорнийском университете в Лос-Анджелесе.
Роботизированная хирургия в настоящее время проводится с использованием хирургической системы da Vinci™, уникального набора технологий, включающего специализированные «руки» для удерживания инструментов и камеры, а также увеличенный экран и консоль.
Понимание роботизированной хирургии
- Что такое малоинвазивная хирургия?
- Как работает роботизированная хирургическая система?
- Меня оперирует робот?
- Роботизированная хирургия: чего ожидать
Преимущества роботизированной хирургии
- Каковы преимущества роботизированной хирургии?
- Какие состояния можно лечить с помощью роботизированной хирургии?
Опасения по поводу роботизированной хирургии
- Может ли любой врач выполнять роботизированную хирургию?
- Безопасна ли роботизированная хирургия?
- Как робот-хирург видит, что он делает?
Восстановление
- Сколько дней я пропущу с работы?
- Варианты обезболивания: после роботизированной хирургии
Что такое малоинвазивная хирургия?
Минимально инвазивный — это всего лишь два модных слова, обозначающих меньшие разрезы. Эти типы операций означают более короткую госпитализацию и более быстрое выздоровление пациентов. Другими преимуществами могут быть:
Эти типы операций означают более короткую госпитализацию и более быстрое выздоровление пациентов. Другими преимуществами могут быть:
- Меньше крови
- Меньше рубцов
- Снижение риска заражения
- Быстрее вернуться к жизни
вернуться к началу
Как работает роботизированная хирургическая система?
Для работы с помощью роботизированной системы хирург делает крошечные надрезы на вашем теле и вводит миниатюрные инструменты и трехмерную камеру высокого разрешения, а иногда разрезы кожи вообще не требуются. Затем с ближайшей консоли ваш хирург манипулирует этими инструментами для выполнения операции.
Думайте о роботизированной системе как о видеоигре. Когда вы играете в видеоигру, вы нажимаете кнопку управления, и машина переводит ваши движения в режим реального времени, точно имитируя ваши движения на экране. Во время процедуры с помощью робота ваш хирург использует основные элементы управления для манипулирования инструментами, а инструменты преобразуют движения вашего хирурга в точные движения внутри вашего тела. Ваш хирург все время находится под контролем; хирургическая система реагирует на указание, которое он дает.
Ваш хирург все время находится под контролем; хирургическая система реагирует на указание, которое он дает.
наверх
Меня оперирует робот?
Мы также знаем, что многие пациенты обеспокоены идеей робота, выполняющего операции. Вы должны знать, что роботизированная хирургическая система на самом деле является системой, которая позволяет вашему хирургу выполнять точные, деликатные движения, управляя аппаратом. Робот никогда не принимает решения и не делает надрезы. Скорее, ваш хирург говорит роботу, что делать, и робот обеспечивает большую точность, чем человеческая рука сама по себе.
Роботизированная система не может «думать» самостоятельно. Он реагирует только на точные движения рук и пальцев хирурга. Ваш хирург находится в операционной и все время руководит процедурой.
вернуться к началу
Роботизированная хирургия: чего ожидать
Во время роботизированной хирургии ваш хирург «направляет» операцию с близкого расстояния, но не стоит над вами, как во время традиционной операции. Хотя каждая операция отличается, вот общие шаги к роботизированной хирургии:
Хотя каждая операция отличается, вот общие шаги к роботизированной хирургии:
- Ваш хирург делает крошечные (длиной от одного до двух сантиметров) надрезы на вашем теле.
- Ваш врач вводит в ваше тело миниатюрные роботизированные инструменты и мощную камеру.
- Затем ваш хирург садится за ближайшую консоль (большой компьютер), чтобы руководить процедурой. На консоли рабочая область видна в большом увеличении с отличным разрешением.
- Сидя за консолью, ваш хирург манипулирует элементами управления.
- Инструменты реагируют на эти движения и преобразуют их в точные движения в реальном времени внутри вашего тела.
- Роботизированные устройства, которые обладают большей ловкостью и диапазоном движений, чем человек, позволяют вашему хирургу успешно проводить деликатные операции в труднодоступных местах.
наверх
Каковы преимущества роботизированной хирургии?
Роботизированная хирургия дает множество преимуществ. Роботизированная хирургия приносит вам прямую пользу — более короткое время восстановления — а также косвенную — у хирурга есть лучшая визуализация, что приводит к более точной операции. Другие преимущества:
Роботизированная хирургия приносит вам прямую пользу — более короткое время восстановления — а также косвенную — у хирурга есть лучшая визуализация, что приводит к более точной операции. Другие преимущества:
- У вашего хирурга больший диапазон движений и ловкость
- Ваш хирург видит сильно увеличенное изображение операционного поля с высоким разрешением
- Ваш хирург имеет лучший доступ к оперируемой области
- Более короткое пребывание в больнице
- Меньший риск заражения
- Меньшая кровопотеря и меньшее количество переливаний крови
- Меньше боли
- Более быстрое восстановление
- Более быстрое возвращение к повседневной жизни
вернуться к началу
Какие заболевания можно лечить с помощью роботизированной хирургии?
Многие состояния были успешно вылечены с помощью роботизированной хирургии. К ним относятся:
- Колоректальная хирургия
- Общая хирургия
- Гинекологическая хирургия
- Кардиохирургия
- Эндометриоз
- Хирургия головы и шеи (трансоральная)
- Торакальная хирургия
- Урологическая хирургия
наверх
Может ли любой врач выполнять роботизированную операцию?
Без соответствующей подготовки ни один врач не может просто войти в операционную и управлять роботизированной операцией. Тем не менее, любой врач может быть успешно обучен роботизированной хирургической системе. Вот почему в Калифорнийском университете в Лос-Анджелесе мы вложили так много не только в обучение наших хирургов, но и в обучение всей нашей роботизированной хирургической бригады, чтобы пациенты могли рассчитывать на наилучший возможный опыт. Познакомьтесь с нашими роботами-хирургами.
Тем не менее, любой врач может быть успешно обучен роботизированной хирургической системе. Вот почему в Калифорнийском университете в Лос-Анджелесе мы вложили так много не только в обучение наших хирургов, но и в обучение всей нашей роботизированной хирургической бригады, чтобы пациенты могли рассчитывать на наилучший возможный опыт. Познакомьтесь с нашими роботами-хирургами.
вернуться к началу
Безопасна ли роботизированная хирургия?
Придя в Калифорнийский университет в Лос-Анджелесе, где безопасность и качество являются нашим главным приоритетом. У нас есть обучение, поддерживаемое симуляционными и образовательными программами, где мы обучаем не только наших собственных врачей, но и врачей со всей страны, чтобы они были лучшими и самыми опытными в своем деле.
вернуться к началу
Как робот-хирург видит, что он или она делает?
Внутри вашего тела находится камера, которая отправляет изображения в режиме реального времени вашему хирургу, сидящему за консолью. На самом деле изображения, которые ваш хирург видит с помощью роботизированной системы, имеют более сильное увеличение и более четкое разрешение, чем то, что он или она увидел бы, стоя над вами.
На самом деле изображения, которые ваш хирург видит с помощью роботизированной системы, имеют более сильное увеличение и более четкое разрешение, чем то, что он или она увидел бы, стоя над вами.
наверх
Сколько дней я пропущу с работы?
Все пациенты разные, и вы должны обсудить свое выздоровление со своим врачом. Как правило, пациенты могут остаться в больнице на одну-две ночи, а затем вернуться домой. Большинство пациентов обнаруживают, что они полностью выздоровели в течение шести недель после операции.
вернуться к началу
Варианты обезболивания после роботизированной хирургии
Мы в Калифорнийском университете в Лос-Анджелесе очень серьезно относимся к обезболиванию после операции. Наши команды исследуют эффективные методы обезболивания для использования после операции, включая роботизированную хирургию. Они будут работать с вами, чтобы убедиться, что ваша боль хорошо снимается до, во время и после операции. Поскольку мы знаем, что боль у людей может продолжаться, когда они возвращаются домой, мы также поможем разработать для вас план лечения боли после выписки из больницы.
вернуться наверх
Связаться с нами
Телефон: 800-UCLA-MD1 (или 800-825-2631)
Ваш робот-хирург примет вас прямо сейчас
безликий белый роботизированный цилиндр размером с мятную мяту, прикрепленный к концу катетера. На операционном столе в Бостонской детской больнице в штате Массачусетс исследователи показывают, как он может ориентироваться в негерметичном сердечном клапане пациента лучше, чем некоторые хирурги с годами обучения. Сначала сборка вставляется в основание сердца. Оттуда он перемещается с помощью моторизованной приводной системы вдоль пульсирующей стенки желудочка к поврежденному клапану в верхней части желудочка, руководствуясь датчиками зрения и осязания. Робот вклинивается в положение рядом с протекающим клапаном. Затем хирург запускает окклюдер — крошечную пробку — из робота, который закупоривает утечку.
«Пациент» на столе — не человек, а свинья — исследователи, создавшие устройство, говорят, что пройдут годы, прежде чем их робот станет руководить ремонтом клапанов у людей. Но его способности намекают на начало новой эры хирургии. Интеллектуальные хирургические роботы с разной степенью автономии в ходе ранних испытаний доказывают, что они не уступают хирургам в некоторых технических задачах, таких как обнаружение ран, наложение швов и удаление опухолей. Эти крошечные, точные операторы обещают чистые результаты и более широкий доступ к специализированным процедурам, а роботы побуждают некоторых хирургов задуматься о том, какова будет их роль во все более автоматизированном ландшафте.
Но его способности намекают на начало новой эры хирургии. Интеллектуальные хирургические роботы с разной степенью автономии в ходе ранних испытаний доказывают, что они не уступают хирургам в некоторых технических задачах, таких как обнаружение ран, наложение швов и удаление опухолей. Эти крошечные, точные операторы обещают чистые результаты и более широкий доступ к специализированным процедурам, а роботы побуждают некоторых хирургов задуматься о том, какова будет их роль во все более автоматизированном ландшафте.
Круиз-контроль
Роботизированная хирургия уже с нами. Такие инструменты, как Da Vinci от Intuitive Surgical в Саннивейле, Калифорния, и Senhance от TransEnterix в Моррисвилле, Северная Каролина, позволяют хирургам управлять несколькими роботами-манипуляторами через ручную консоль и дают им большую ловкость и обзор во время операции. в труднодоступных местах. Но такие устройства, как капсульный робот в Бостонской детской больнице, идут еще дальше: они могут работать независимо, по крайней мере, часть процедуры.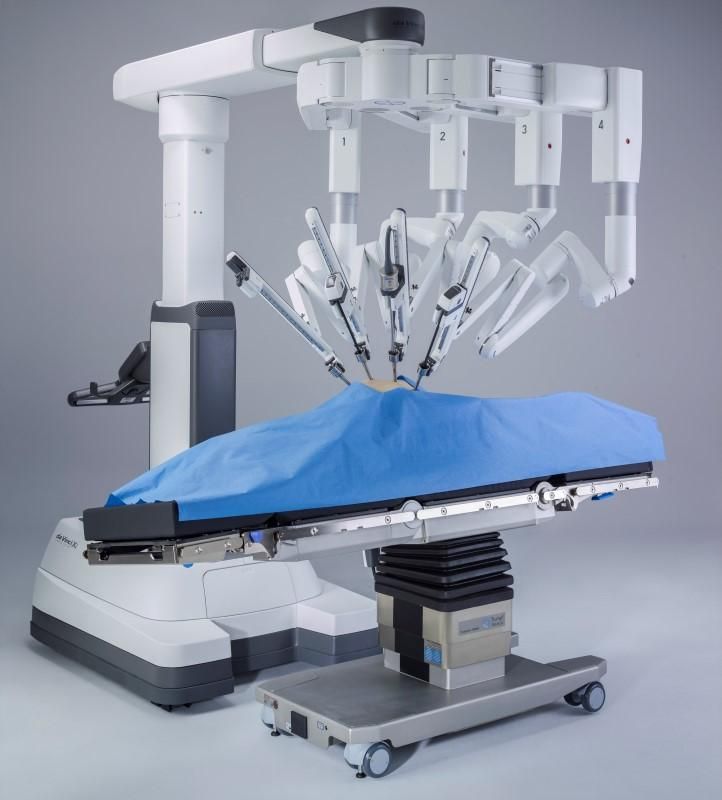
Часть Nature Outlook: цифровое здоровье
Этот следующий уровень помощи позволяет выполнять сложные хирургические трюки, не беспокоясь о том, что их руки могут соскользнуть или их хватка ослабнет — положительный момент, учитывая, что ошибки врачей ежегодно приводят к более чем 200 000 смертей в США 1 . «Хирург может щелкнуть, щелкнуть, щелкнуть — это те места, где я хочу наложить шов», — говорит Анимеш Гарг, ученый-компьютерщик из Университета Торонто в Канаде, который большую часть десятилетия работал над автоматизацией хирургии. . «Мы хотели, чтобы это было похоже на круиз-контроль в хирургии».
По словам Леннокса Хойта, инженера и хирурга-урогинеколога из Института тазового дна в Тампе, Флорида, не каждый хирургический маневр является хорошим кандидатом для роботизированной автоматизации. По его словам, такие задачи, как наложение швов и восстановление клапана, как правило, являются задачами, которые хирурги считают скучными и повторяющимися. Чем проще процедура разбита на основные, конкретные команды, тем легче умному роботу учиться и выполнять ее. «Мышление часто связано с более сложными инструментами, но более простыми движениями», — говорит Пьер Дюпон, инженер исследовательской группы роботов Бостонской детской больницы.
Чем проще процедура разбита на основные, конкретные команды, тем легче умному роботу учиться и выполнять ее. «Мышление часто связано с более сложными инструментами, но более простыми движениями», — говорит Пьер Дюпон, инженер исследовательской группы роботов Бостонской детской больницы.
Шаг за шагом
Наложение швов можно разбить на простые, легко определяемые движения, что идеально подходит для независимых хирургических роботов. Команда, в которую входил инженер Аксель Кригер, в то время работавший в Детской национальной системе здравоохранения в Вашингтоне, округ Колумбия, разработала систему, которая использует легкую роботизированную руку для самостоятельного наложения ряда специализированных швов 2 . Кригер и его коллеги хотели автоматизировать хирургическую задачу, называемую кишечным анастомозом, при которой два сегмента кишечника сшиваются после удаления части органа. Процедура обычно требует неуклюжих и запутанных движений рук, которые даже лучшие хирурги изо всех сил пытаются сделать идеально. «Вы должны очень точно наложить 20 швов, и если вы пропустите один из них, у вас будет утечка», — говорит Кригер, который сейчас работает в Университете Мэриленда в Колледж-Парке.
«Вы должны очень точно наложить 20 швов, и если вы пропустите один из них, у вас будет утечка», — говорит Кригер, который сейчас работает в Университете Мэриленда в Колледж-Парке.
Кригер знал, что для проведения процедуры робот должен уметь проталкивать иглу через мягкие ткани, а это сложная задача, поскольку ткань может непредсказуемо смещаться, когда игла проходит через нее. Поэтому команда оснастила своего хирургического робота, получившего название Smart Tissue Autonomous Robot или STAR, датчиком силы, чтобы игла не нажимала слишком сильно и не деформировала ткань.
Клапан сердца восстанавливается с помощью робота, который сам направляется к месту операции. Как только он прибывает, хирург берет на себя управление с помощью джойстика, чтобы сделать окончательный ремонт. Кредит: Пьер Дюпон
Робот направляется туда, где нужно наложить швы, с помощью точек инфракрасного биоклея, которые исследователи наносят на ткань толстой кишки. Эти маркеры, по словам Кригера, позволяют роботу «отслеживать движение ткани и корректировать каждый стежок» — даже в такой темной и тесной среде, как брюшная полость. В испытании на живых свиньях STAR наложил швы, которые были более равномерными и герметичными, чем швы, сделанные специалистами 2 . Исследователи контролировали автоматизированную процедуру, чтобы убедиться, что каждый стежок выполнен правильно, иногда внося небольшие коррективы в положение нити.
В испытании на живых свиньях STAR наложил швы, которые были более равномерными и герметичными, чем швы, сделанные специалистами 2 . Исследователи контролировали автоматизированную процедуру, чтобы убедиться, что каждый стежок выполнен правильно, иногда внося небольшие коррективы в положение нити.
Помимо усовершенствования техники наложения швов STAR, Кригер обучает робота еще одному навыку: удалению опухоли 3 . Как и прежде, Кригер и его коллеги используют инфракрасные маркеры, но на этот раз для обозначения участков раковой ткани. Затем робот выборочно вырезает эти части нагретым кончиком электрода. Ранние испытания на свиных тканях показали, что STAR может удалять опухоли и разрезать ткани так же точно, как и хирурги, что является важным навыком, поскольку оставление даже нескольких опухолевых клеток может привести к рецидиву рака. «Вы должны быть невероятно точными, чтобы не оставить опухоль [или] не вырезать здоровую ткань», — говорит Кригер.
Восстановление сердечного клапана также является испытанием для храбрости даже опытных хирургов, отчасти из-за сложности правильного размещения хирургических инструментов в ограниченном пространстве. Именно эта трудность побудила Дюпона и его команду разработать автономного робота для этой задачи. Кривая обучения для инженеров проекта была крутой, говорит Дюпон. Чтобы свести к минимуму хирургический риск, небольшой робот команды должен будет совершить точное путешествие от основания сердца к поврежденному клапану, пока сердце человека бьется, что означает перемещение в среде, которая находится в постоянном энергичном движении.
Именно эта трудность побудила Дюпона и его команду разработать автономного робота для этой задачи. Кривая обучения для инженеров проекта была крутой, говорит Дюпон. Чтобы свести к минимуму хирургический риск, небольшой робот команды должен будет совершить точное путешествие от основания сердца к поврежденному клапану, пока сердце человека бьется, что означает перемещение в среде, которая находится в постоянном энергичном движении.
Команда дала роботу подробную карту типичного сердца, включая расположение конкретных сосудов и клапанов. Робот использует эту информацию в качестве ориентира в каждой процедуре. Но устройство также легко адаптируется, используя входные данные от встроенных сенсорных и визуальных датчиков для обнаружения утечек клапана в каждом сердце. Чтобы точно определить свое точное местоположение, робот повторяет легкий постукивающий контакт со стенкой сердца, «как тараканы, постукивающие своими усиками», — говорит Дюпон. В испытаниях на животных в этом году робот успешно прошел от точки входа к поврежденной области клапана 9. 5% времени 4 .
5% времени 4 .
Медленная, неуклонная революция
Исследователи надеются, что автономная хирургия сделает специализированные процедуры доступными для большего числа людей. В США «распределение хирургов по стране неравномерно», — говорит уролог Кирстен Грин из Калифорнийского университета в Сан-Франциско. «Есть много областей, куда люди не имеют доступа». То же самое верно и для стран по всему миру. Она отмечает, что помощь автономных роботов может помочь заполнить некоторые из этих пробелов в хирургическом опыте. По словам Гарга, технология также может сократить время, необходимое начинающим хирургам для изучения своего дела. Роботы могут позволить им выполнять сложные процедуры с меньшим количеством лет обучения.
Роботы-хирурги еще не могут выполнить всю операцию от начала до конца. «Через десять лет некоторые стандартные процедуры могут быть автоматизированы, — говорит Гарг. Например, «операции очень большого объема — удаление желчного пузыря, аппендэктомия». Но до этого еще далеко, потому что хирурги все еще намного лучше, чем роботы, взвешивают свой прошлый опыт, чтобы принимать сложные хирургические решения, например, что делать, когда кровеносный сосуд находится не в том месте, где ожидалось. «Когда вам нужно понимание контекста, именно здесь роботы начинают очень быстро давать сбои», — говорит Гарг. Скорее всего, автономные хирургические устройства постепенно войдут в клиническую практику, точно так же, как такие функции, как круиз-контроль, а позже и системы удержания в полосе движения, появились в автомобилях раньше, чем полноценные возможности самостоятельного вождения. В дополнение к хорошо зарекомендовавшим себя роботам-помощникам, таким как да Винчи, Кригер указывает, что роботы также используются для таких процедур, как разрезы костей и доставка радиации для лечения рака.
Но до этого еще далеко, потому что хирурги все еще намного лучше, чем роботы, взвешивают свой прошлый опыт, чтобы принимать сложные хирургические решения, например, что делать, когда кровеносный сосуд находится не в том месте, где ожидалось. «Когда вам нужно понимание контекста, именно здесь роботы начинают очень быстро давать сбои», — говорит Гарг. Скорее всего, автономные хирургические устройства постепенно войдут в клиническую практику, точно так же, как такие функции, как круиз-контроль, а позже и системы удержания в полосе движения, появились в автомобилях раньше, чем полноценные возможности самостоятельного вождения. В дополнение к хорошо зарекомендовавшим себя роботам-помощникам, таким как да Винчи, Кригер указывает, что роботы также используются для таких процедур, как разрезы костей и доставка радиации для лечения рака.
Самоуправляемые роботы могут быть созданы на основе хирургических инструментов, которые уже есть в некоторых больничных системах, что может помочь ускорить автоматизацию. Некоторые конструкции Гарга, например, могут быть присоединены к роботизированной системе Да Винчи, которая использовалась в более чем шести миллионах операций под руководством человека по всему миру. «Если у вас есть установленная роботизированная платформа, — говорит Дюпон, — вы можете постепенно добавлять эти уровни автономии». Однако на каждом этапе исследователям нужно будет доказывать, что их устройства готовы к клиническому использованию. Одно дело соединять куски мяса в тарелке или даже у животного на операционном столе, но совсем другое — делать то же самое с людьми, — говорит Гарг, — терпимость к неудаче ничтожна.
Некоторые конструкции Гарга, например, могут быть присоединены к роботизированной системе Да Винчи, которая использовалась в более чем шести миллионах операций под руководством человека по всему миру. «Если у вас есть установленная роботизированная платформа, — говорит Дюпон, — вы можете постепенно добавлять эти уровни автономии». Однако на каждом этапе исследователям нужно будет доказывать, что их устройства готовы к клиническому использованию. Одно дело соединять куски мяса в тарелке или даже у животного на операционном столе, но совсем другое — делать то же самое с людьми, — говорит Гарг, — терпимость к неудаче ничтожна.
Еще из Nature Outlooks
Возможность большей автоматизации уже вызывает вопросы о том, как изменится роль хирурга, если интеллектуальные роботы возьмут на себя самые сложные маневры. Большинство специалистов в этой области по-прежнему видят место для хирургов, хотя им нужно будет стать непревзойденными менеджерами, доказывающими свое мастерство не только в конкретных процедурах, но и в использовании множества автоматизированных инструментов для достижения наилучших результатов. «Я не думаю, что вы делаете людей устаревшими. Вы переводите их на следующий уровень, где они действуют больше как дирижеры», — говорит Хойт. Гарг соглашается: «Для общей картины вам нужен человек во главе».
«Я не думаю, что вы делаете людей устаревшими. Вы переводите их на следующий уровень, где они действуют больше как дирижеры», — говорит Хойт. Гарг соглашается: «Для общей картины вам нужен человек во главе».
По крайней мере, на данный момент это их план. Но если автономные роботы-хирурги будут развернуты в больших масштабах, они могут начать развиваться неожиданным образом. Гарг, например, разрабатывает самоуправляемых роботов, которые учатся на своих неудачах и успехах почти так же, как и люди, сужая человеческое преимущество. В конечном счете, роботы могут делиться информацией, полученной в результате сотен операций, со всеми другими роботами в обширной сети, повышая их производительность. «Вы можете соединить все эти системы вместе, поэтому, если лечится необычная анатомия, эта информация о конкретном случае будет доступна в другом месте», — говорит Дюпон. Но до такого обмена разведданными еще далеко. На данный момент, подчеркивает Дюпон, автономные роботы призваны помогать хирургам-людям, а не затмевать их. «Если у вас есть система, которая может ускорить обучение врачей и помочь им выполнять часть процедуры, это будет настоящим преимуществом».
«Если у вас есть система, которая может ускорить обучение врачей и помочь им выполнять часть процедуры, это будет настоящим преимуществом».
История робототехники в хирургии
1. Kwoh YS, Hou J, Jonckheere EA, Hayati S. Робот с повышенной точностью абсолютного позиционирования для стереотаксической хирургии головного мозга под контролем КТ. Транзакции IEEE по биомедицинской инженерии. 1988: 153–160. [PubMed] [Google Scholar]
2. Пугин Ф., Бухер П., Морел П. История роботизированной хирургии: от AESOP(R) и ZEUS(R) до да Винчи(R) Журнал висцеральной хирургии. 2011 окт; 148 (5 Дополнение): e3 – e8. [PubMed] [Академия Google]
3. Sackier JM, Wang Y. Роботизированная лапароскопическая хирургия. От концепции до разработки. Хирургическая эндоскопия. 1994 г., январь; 8 (1): 63–66. [PubMed] [Google Scholar]
4. Marescoux J, Rubino F. Роботизированная система ZEUS: экспериментальное и клиническое применение. Хирургические клиники Северной Америки. 2003 г. , декабрь; 83 (6): 1305–1315. VII-VIII. [PubMed] [Google Scholar]
, декабрь; 83 (6): 1305–1315. VII-VIII. [PubMed] [Google Scholar]
5. Хирургическая робототехника. Оценка роботизированного держателя эндоскопа Computer Motion AESOP 3000. Устройства для здоровья. 2002 г., июль; 31 (7): 256–268. [PubMed] [Академия Google]
6. Баллантайн Г.Х., Молл Ф. Телероботизированная хирургическая система да Винчи: виртуальное операционное поле и хирургия телеприсутствия. Хирургические клиники Северной Америки. 2003 г., декабрь; 83 (6): 1293–1304. vii. [PubMed] [Google Scholar]
7. Ньюлин М.Э., Миками Д.Дж., Мелвин С.В. Первоначальный опыт работы с четырехрычажным компьютеризированным телехирургическим устройством в хирургии передней кишки. Журнал лапароэндоскопических и передовых хирургических методов. Часть A. июнь 2004 г .; 14 (3): 121–124. [PubMed] [Академия Google]
8. Haber GP, White MA, Autorino R, et al. Новые роботизированные инструменты Да Винчи для лапароэндоскопической односторонней хирургии. Урология. 2010 г., декабрь; 76 (6): 1279–1282. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
9. Mendez I, Hill R, Clarke D, Kolyvas G, Walling S. Роботизированное дистанционное теленаставничество в нейрохирургии. Нейрохирургия. 2005 г., март; 56 (3): 434–440. обсуждение 434–440. [PubMed] [Google Scholar]
10. Двиведи Дж. Роботизированная хирургия. Обзор последних достижений в хирургических роботизированных системах. Конференция во Флориде, 2012 г., посвященная последним достижениям в области робототехники. 2012 Май [Академия Google]
11. Garg A, Dwivedi RC, Sayed S, et al. Роботизированная хирургия рака головы и шеи: обзор. Оральная онкология. 2010 г., август; 46 (8): 571–576. [PubMed] [Google Scholar]
12. Mack MJ. Малоинвазивная и роботизированная хирургия. JAMA: журнал Американской медицинской ассоциации. 2001 г., 7 февраля; 285 (5): 568–572. [PubMed] [Google Scholar]
13. Allendorf JD, Bessler M, Whelan RL, et al. Послеоперационная иммунная функция изменяется обратно пропорционально степени хирургической травмы в мышиной модели. Хирургическая эндоскопия. 1997 мая; 11 (5): 427–430. [PubMed] [Google Scholar]
Хирургическая эндоскопия. 1997 мая; 11 (5): 427–430. [PubMed] [Google Scholar]
14. Fuchs KH. Малоинвазивная хирургия. Эндоскопия. 2002 г., февраль; 34 (2): 154–159. [PubMed] [Google Scholar]
15. Oliveira CM, Nguyen HT, Ferraz AR, Watters K, Rosman B, Rahbar R. Роботизированная хирургия в отоларингологии и хирургии головы и шеи: обзор. Малоинвазивная хирургия. 2012;2012:286563. [Бесплатная статья PMC] [PubMed] [Google Scholar]
16. Weinstein GS, O’Malley BW, Hockstein NG. Трансоральная роботизированная хирургия: надгортанная ларингэктомия на собачьей модели. Ларингоскоп. 2005;1115(7):1315–1319.. [PubMed] [Google Scholar]
17. Weinstein GS, O’Malley BW, Snyder W, Sherman E, Quon H. Трансоральная роботизированная хирургия: радикальная тонзиллэктомия. Архив отоларингологии — Хирургия головы и шеи. 2007;133(12):1220–1226. [PubMed] [Google Scholar]
18. Park YM, Kim WS, Byeon HK, Choi EC, Kim SH. Сравнение онкологических и функциональных результатов после трансоральной роботизированной боковой орофарингэктомии по сравнению с традиционной операцией при раке миндалин T1-T3. Голова и шея. 8 июля 2013 г. [PubMed] [Google Scholar]
Голова и шея. 8 июля 2013 г. [PubMed] [Google Scholar]
19. Dziegielewski PT, Teknos TN, Durmus K, et al. Трансоральная роботизированная хирургия рака ротоглотки: долгосрочное качество жизни и функциональные результаты. JAMA отоларингология — хирургия головы и шеи. 2013 10 апреля;: 1–9. [Бесплатная статья PMC] [PubMed] [Google Scholar]
20. Nichols AC, Yoo J, Hammond JA, et al. Плоскоклеточный рак ротоглотки на ранней стадии: лучевая терапия по сравнению с трансоральной роботизированной хирургией (ORATOR) — протокол исследования для рандомизированного исследования II фазы. Рак БМК. 2013;13:133. [Бесплатная статья PMC] [PubMed] [Google Scholar]
21. Lawson G, Matar N, Remacle M, Jamart J, Bachy V. Трансоральная роботизированная хирургия для лечения опухолей головы и шеи: кривая обучения. 2011;268(12):1795–1801. [PubMed] [Google Scholar]
22. Lobe TE, Wright SK, Irish MS. Новое применение хирургической робототехники в хирургии головы и шеи. Журнал лапароэндоскопических и передовых хирургических методов.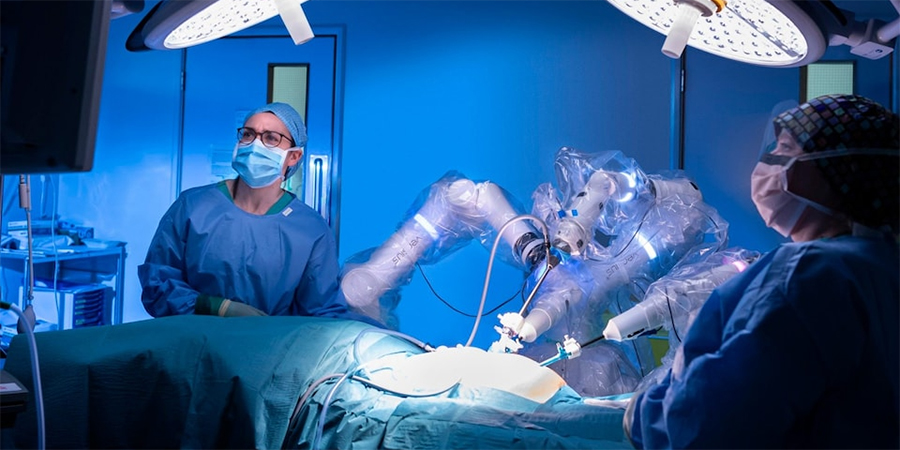 Часть A. Декабрь 2005 г .; 15 (6): 647–652. [PubMed] [Google Scholar]
Часть A. Декабрь 2005 г .; 15 (6): 647–652. [PubMed] [Google Scholar]
23. Kang SW, Jeong JJ, Yun JS, et al. Роботизированная эндоскопическая хирургия рака щитовидной железы: опыт первых 100 пациентов. Хирургическая эндоскопия. 2009 г.23 ноября (11): 2399–2406. [PubMed] [Google Scholar]
24. Lee J, Nah KY, Kim RM, Ahn YH, Soh EY, Chung WY. Различия в послеоперационных результатах, функциях и косметике: открытая и роботизированная тиреоидэктомия. Хирургическая эндоскопия. 2010 дек; 24 (12): 3186–3194. [PubMed] [Google Scholar]
25. Hentschel SJ, Sawaya R. Оптимизация результатов с максимальной хирургической резекцией злокачественных глиом. Борьба с раком: журнал Moffitt Cancer Center. 2003: 109–114. [PubMed] [Академия Google]
26. Либерсон Р.Э., Адлер Дж.Р., Солтыс С.Г., Чой С., Гиббс И.С., Чанг С.Д. Стереотаксическая радиохирургия как первичный метод лечения новых и рецидивных параганглиом: остается ли открытая хирургическая резекция методом выбора? Мировая нейрохирургия.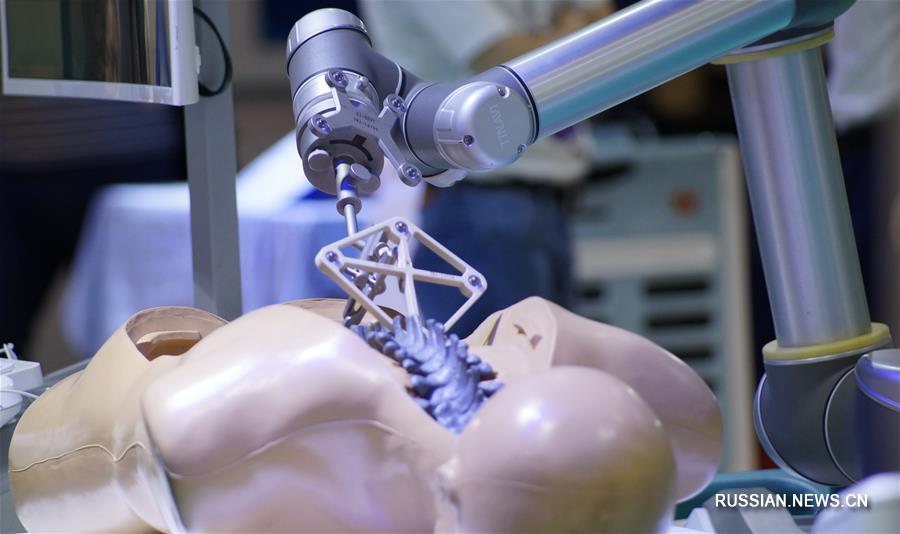 2012 г., май-июнь; 77 (5–6): 745–761. [PubMed] [Google Scholar]
2012 г., май-июнь; 77 (5–6): 745–761. [PubMed] [Google Scholar]
27. Benabid AL, Cinquin P, Lavalle S, Le Bas JF, Demogeot J, de Rougemont J. Компьютеризированный робот для стереотаксической хирургии, подключенный к компьютерной томографии и магнитно-резонансной томографии. Технологический проект и предварительные результаты. Прикладная нейрофизиология. 1987;50(1–6):153–154. [PubMed] [Google Scholar]
28. Nathoo N, Cavusoglu MC, Vogelbaum MA, Barnett GH. На связи с робототехникой: нейрохирургия будущего. Нейрохирургия. 2005; 56: 421–433. [PubMed] [Google Scholar]
29. Das H, Zak H, Johnson J, Crouch J, Frambach D. Оценка телероботизированной системы для помощи хирургам в микрохирургии. Компьютерная хирургия: официальный журнал Международного общества компьютерной хирургии. 1999;4(1):15–25. [PubMed] [Академия Google]
30. Макбет П.Б., Лоу Д.Ф., Ризун П.Р., Сазерленд Г.Р. Робототехника в нейрохирургии. Американский журнал хирургии. 2004 г., октябрь; 188 (4): 68–75. [PubMed] [Google Scholar]
[PubMed] [Google Scholar]
31. Margossian H, Garcia-Ruiz A, Falcone T, Goldberg JM, Attaran M, Gagner M. Роботизированный лапароскопический микрохирургический анастомоз рога матки. Фертильность и бесплодие. 1998 г., сен; 70 (3): 530–534. [PubMed] [Google Scholar]
32. Falcone T, Goldberg JM, Margossian H, Stevens L. Роботизированный лапароскопический микрохирургический трубный анастомоз: пилотное исследование на людях. Фертильность и бесплодие. 2000 г., май; 73 (5): 1040–1042. [PubMed] [Академия Google]
33. Дегельдре М., Вандромм Дж., Хыонг П.Т., Кадьер Г.Б. Роботизированный лапароскопический микрохирургический реанастомоз маточных труб: технико-экономическое обоснование. Фертильность и бесплодие. 2000 ноябрь; 74 (5): 1020–1023. [PubMed] [Google Scholar]
34. Diaz-Arrastia C., Jurnalov C., Gomez G., Townsend C. Лапароскопическая гистерэктомия с использованием хирургического робота с компьютерным усилением. Хирургическая эндоскопия и другие интервенционные методы. 2002 г., сен; 16 (9): 1271–1273. [PubMed] [Google Scholar]
2002 г., сен; 16 (9): 1271–1273. [PubMed] [Google Scholar]
35. Advincula AP, Song A, Burke W, Reynolds RK. Предварительный опыт роботизированной лапароскопической миомэктомии. Журнал Американской ассоциации гинекологов-лапароскопистов. 2004 г., ноябрь; 11 (4): 511–518. [PubMed] [Академия Google]
36. Диодато М.Д., младший, Просад С.М., Клингенсмит М.Е., Дамиано Р.Дж., младший. Робототехника в хирургии. Актуальные проблемы хирургии. 2004 г., сен; 41 (9): 752–810. [PubMed] [Google Scholar]
37. Diodato MD, Jr, Damiano RJ, Jr Роботизированная кардиохирургия: обзор. Хирургические клиники Северной Америки. 2003 г., декабрь; 83 (6): 1351–1367. икс. [PubMed] [Google Scholar]
38. Detter C, Boehm DH, Reichenspurner H, Deuse T, Arnold M, Reichart B. Роботизированная хирургия коронарных артерий с искусственным кровообращением и без него — от первого клинического применения до эндоскопической операции. Монитор медицинских наук: международный медицинский журнал экспериментальных и клинических исследований. 2002 г., июль; 8 (7): MT118–MT123. [PubMed] [Академия Google]
2002 г., июль; 8 (7): MT118–MT123. [PubMed] [Академия Google]
39. Damiano RJ, Jr, Ehrman WJ, Ducko CT, et al. Первые клинические испытания роботизированного эндоскопического аортокоронарного шунтирования в США. Журнал торакальной и сердечно-сосудистой хирургии. 2000 г., январь; 119 (1): 77–82. [PubMed] [Google Scholar]
40. Prasad SM, Ducko CT, Stephenson ER, Chambers CE, Damiano RJ., Jr Проспективное клиническое испытание роботизированной эндоскопической коронарной пластики с последующим наблюдением в течение 1 года. Анналы хирургии. 2001 г., июнь; 233 (6): 725–732. [Бесплатная статья PMC] [PubMed] [Google Scholar]
41. Boyd WD, Kiaii B, Novick RJ, et al. RAVECAB: улучшение результатов в хирургии минимального доступа без искусственного кровообращения с роботизированной помощью и улучшенным видео. Канадский журнал хирургии. Журнал канадской хирургии. 2001 г., февраль; 44 (1): 45–50. [Бесплатная статья PMC] [PubMed] [Google Scholar]
42. Kiaii B, Boyd WD, Rayman R, et al. Роботизированная коронарная хирургия с закрытой грудной клеткой, дополненная компьютером: предварительный опыт использования Harmonic Scalpel и ZEUS. Форум кардиохирургии. 2000;3(3):194–19.7. [PubMed] [Google Scholar]
Роботизированная коронарная хирургия с закрытой грудной клеткой, дополненная компьютером: предварительный опыт использования Harmonic Scalpel и ZEUS. Форум кардиохирургии. 2000;3(3):194–19.7. [PubMed] [Google Scholar]
43. Business Wire. Нью-Йорк: Business Wire; 2004 г. Первая в мире роботизированная операция коронарного шунтирования с использованием революционного эндоскопического устройства для дистального анастомоза. [Google Scholar]
44. Гросси Э.А., Ла Пьетра А., Галлоуэй А.С., Колвин С.Б. Видеоскопическая пластика и замена митрального клапана с использованием техники доступа к порту. Успехи кардиохирургии. 2001; 13:77–88. [PubMed] [Google Scholar]
45. Onnasch JF, Schneider F, Falk V, Mierzwa M, Bucerius J, Mohr FW. Пять лет малоинвазивной хирургии митрального клапана: от экспериментального к рутинному подходу. Форум кардиохирургии. 2002;5(2):132–135. [PubMed] [Академия Google]
46. Косгроув Д.М., 3-й, Сабик Дж.Ф., Навиа Дж.Л. Миниинвазивные операции на клапанах. Анналы торакальной хирургии. 1998 г., июнь; 65 (6): 1535–1538. обсуждение 1538–1539 гг. [PubMed] [Google Scholar]
Анналы торакальной хирургии. 1998 г., июнь; 65 (6): 1535–1538. обсуждение 1538–1539 гг. [PubMed] [Google Scholar]
47. Navia JL, Cosgrove DM., 3-я минимально инвазивная операция на митральном клапане. Анналы торакальной хирургии. 1996 г., ноябрь; 62 (5): 1542–1544. [PubMed] [Google Scholar]
48. Читвуд В. Р., младший, Виксон С. Л., Элбири М. Р., Моран Дж. Ф., Чепмен В. Х., Ласт Р. М. Видеоассистированная малоинвазивная хирургия митрального клапана. Журнал торакальной и сердечно-сосудистой хирургии. 1997 ноября; 114 (5): 773–780. обсуждение 780–772. [PubMed] [Google Scholar]
49. Torracca L, Ismeno G, Quarti A, Alfieri O. Полностью эндоскопическое закрытие дефекта межпредсердной перегородки с помощью роботизированной системы: опыт семи случаев. Форум кардиохирургии. 2002;5(2):125–127. [PubMed] [Google Scholar]
50. Брэдбери Дж. Путешествие к центру тела. Ланцет. 2000 г., 16 декабря; 356 (9247): 2074. [PubMed] [Google Scholar]
51. Moglia A, Menciassi A, Schurr MO, Dario P.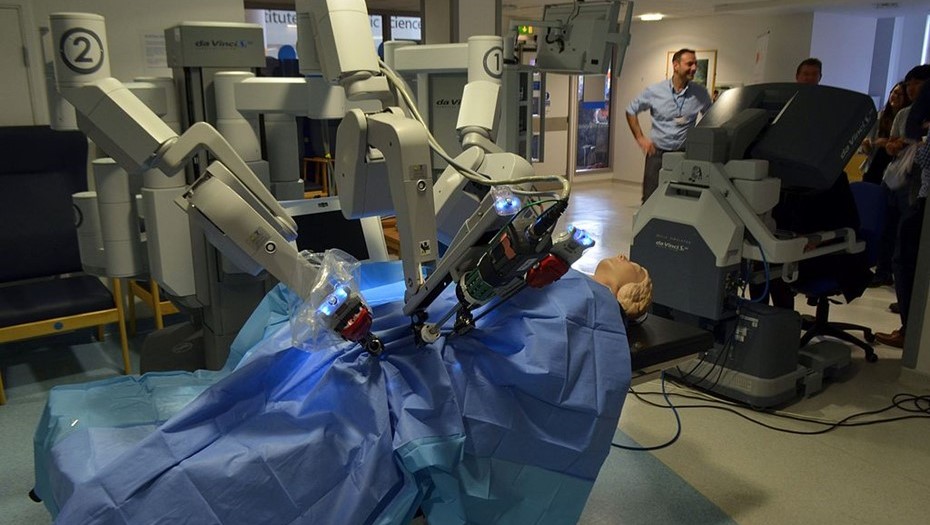 Беспроводная капсульная эндоскопия: от диагностических устройств до многоцелевых роботизированных систем. Биомедицинские микроустройства. 2007 апр; 9(2): 235–243. [PubMed] [Google Scholar]
Беспроводная капсульная эндоскопия: от диагностических устройств до многоцелевых роботизированных систем. Биомедицинские микроустройства. 2007 апр; 9(2): 235–243. [PubMed] [Google Scholar]
52. Weinstein DH, deRijke S, Chow Chow, et al. Новый метод определения кислотности желудочного сока с помощью беспроводной капсулы для измерения pH. Пищевая фармакология и терапия. 2013 июнь; 37 (12): 1198–1209. [Бесплатная статья PMC] [PubMed] [Google Scholar]
53. Coratti A, Annecchiarico M, Marino M, Gentile E, Coratti F, Giulianotti PC. Роботизированная гастрэктомия при раке желудка: текущее состояние и технические аспекты. Всемирный журнал хирургии. 2013 май; Опубликовано в Интернете. [PubMed] [Академия Google]
54. Cadiere GB, Himpens J, Vertruyen M, Favretti F. Первая в мире операция по удалению ожирения, выполненная хирургом на расстоянии. Хирургия ожирения. 1999 г., 9 апреля (2): 206–209. [PubMed] [Google Scholar]
55. Hanly EJ, Talamini MA. Роботизированная абдоминальная хирургия. Американский журнал хирургии. 2004 г., октябрь; 188 (приложение 4A): 19S–26S. [PubMed] [Google Scholar]
Американский журнал хирургии. 2004 г., октябрь; 188 (приложение 4A): 19S–26S. [PubMed] [Google Scholar]
56. Cadiere GB, Himpens J, Vertruyen M, et al. Оценка телехирургической (роботизированной) фундопликации по NISSEN. Хирургическая эндоскопия. 2001 Сентябрь; 15 (9)): 918–923. [PubMed] [Google Scholar]
57. Melvin WS, Needleman BJ, Krause KR, Schneider C, Ellison EC. Компьютеризированная хирургия против стандартной лапароскопической антирефлюксной хирургии. Журнал желудочно-кишечной хирургии: официальный журнал Общества хирургии пищеварительного тракта. 2002 г., январь-февраль; 6 (1): 11–15. обсуждение 15–16. [PubMed] [Google Scholar]
58. Yu HY, Hevelone ND, Lipsitz SR, Kowalczyk KJ, Hu JC. Использование, стоимость и сравнительная эффективность роботизированной, лапароскопической и открытой урологической хирургии. Журнал урологии. 2012 Апрель; 187 (4): 1392–1398. [PubMed] [Google Scholar]
59. Binder J, Jones J, Bentas W, et al. [Роботизированная лапароскопия в урологии. Радикальная простатэктомия и реконструктивные забрюшинные вмешательства // Der Urologe. Авг. А. 2002 г., март; 41 (2): 144–149. [PubMed] [Google Scholar]
Радикальная простатэктомия и реконструктивные забрюшинные вмешательства // Der Urologe. Авг. А. 2002 г., март; 41 (2): 144–149. [PubMed] [Google Scholar]
60. Menon M, Hemal AK, Tewari A, et al. Нервозберегающая радикальная цистопростатэктомия с помощью робота и отведение мочи. БЖУ интернэшнл. 2003 г., август; 92 (3): 232–236. [PubMed] [Google Scholar]
61. Rassweiler J, Rassweiler MC, Kenngott H, et al. Прошлое, настоящее и будущее малоинвазивной терапии в урологии: обзор и спекулятивный взгляд. Минимально инвазивная терапия и родственные технологии: MITAT: официальный журнал Общества минимально инвазивной терапии. 2013 г., 30 июня; [PubMed] [Академия Google]
62. Guillonneau B, Jayet C, Tewari A, Vallancien G. Роботизированная лапароскопическая нефрэктомия. Журнал урологии. 2001 г., июль; 166 (1): 200–201. [PubMed] [Google Scholar]
63. Uberoi J, Disick GI, Munver R. Минимально инвазивное хирургическое лечение обструкции тазово-мочеточникового соединения: обновленная информация о текущем состоянии роботизированной пиелопластики. БЖУ интернэшнл. 2009 г., декабрь; 104 (11): 1722–1729. [PubMed] [Google Scholar]
БЖУ интернэшнл. 2009 г., декабрь; 104 (11): 1722–1729. [PubMed] [Google Scholar]
64. Gettman MT, Neururer R, Bartsch G, Peschel R. Расчлененная пиелопластика Anderson-Hynes, выполненная с использованием роботизированной системы da Vinci. Урология. 2002 сен; 60 (3): 509–513. [PubMed] [Google Scholar]
65. Ficarra V, Wiklund PN, Rochat CH, et al. Европейская ассоциация урологов Секция роботизированной урологии (ERUS) провела обзор роботизированной радикальной простатэктомии (RARP) BJU international. 2013 г., апрель; 111 (4): 596–603. [PubMed] [Google Scholar]
66. Digioia AM. Сравнение механического шаблона для выравнивания вертлужной впадины с компьютерным размещением гнезда. Журнал эндопротезирования. 2002; 17: 359–364. [PubMed] [Google Scholar]
67. Cobb J, KH, Gomes P, et al. Практическая роботизированная однокомпонентная замена коленного сустава: проспективное рандомизированное контролируемое исследование системы акроботов. Журнал костно-суставной хирургии. Британский том. 2006 г., февраль; 88 (2): 188–19.7. [PubMed] [Google Scholar]
Британский том. 2006 г., февраль; 88 (2): 188–19.7. [PubMed] [Google Scholar]
68. Lang JE, Mamnava S, Floyd AJ, et al. Роботизированные системы в ортопедической хирургии. Журнал костей и суставов. 2011;93:1296–1299. [PubMed] [Google Scholar]
69. Йоскович Л., Милгром С., А. С. FRACAS: система для компьютерной хирургии переломов длинных костей под визуальным контролем. Компьютерная хирургия. 1998; 36: 271–288. [PubMed] [Google Scholar]
70. Parekattil SK, Moran ME. Роботизированное оборудование: эволюция и микрохирургические приложения. Индийский журнал урологии. 2010;26(3):395–403. [Бесплатная статья PMC] [PubMed] [Google Scholar]
71. Университет Иллинойса предлагает роботизированную хирургию рака головы и шеи. Служба новостей ФРС США, включая новости штата США. 2013 [Google Scholar]
72. Каур С. Как медицинские роботы повлияют на нашу жизнь. Технический обзор IETE. 2012 г., май; 29 (3): 184–187. [Google Scholar]
73. Финли Д.С., Нгуен Н.